当前位置 : 中国机器人峰会 >> 大会新闻
发布时间:2020-09-07发布人:中国机器人峰会
8月23日,期刊《Small》(影响因子11.459)在线刊发了中国科学院丁汉院士与华中科技大学吴志刚教授联合团队关于液态金属的最新研究成果:Hydroprinted Liquid‐Alloy‐Based Morphing Electronics for Fast‐Growing/Tender Plants: From Physiology Monitoring to Habit Manipulation(基于液态金属水转印技术面向快速生长娇嫩植物的变形电子:从生理检测到生长操控)。
实时检测活体植物生理信号并操控植物生长能够为植物学研究、植物机器人以及精准作物管理提供实用和精确的手段,将传感器和功能器件集成并应用到植物上,对于构建生物智能系统和植物机器人具有重要意义。
新兴的表皮电子技术近年来发展迅速,形成了许多应用于人体和动物生理信号检测的成熟技术,对于检测植物信号和创造植物机器人具有理想潜力。然而,表皮电子技术在植物上的集成存在几个苛刻挑战。首先,许多植物太过脆弱和娇嫩,难以承受强烈的外部物理/化学刺激,如机械压力、热、酸碱、毒性化学蒸汽等,因而植物电子制造过程必须轻柔温和;其次,由于植物生长发育快速,且形态会发生明显变化,因此形成的表皮电子系统应该具有本质可变形性,能够依附植物形态变化同时不影响其生长;第三,植物表皮复杂的微纳米尺度结构,需要特殊的表皮附着技术。目前存在的制造加工技术难以同时应对这三个挑战。
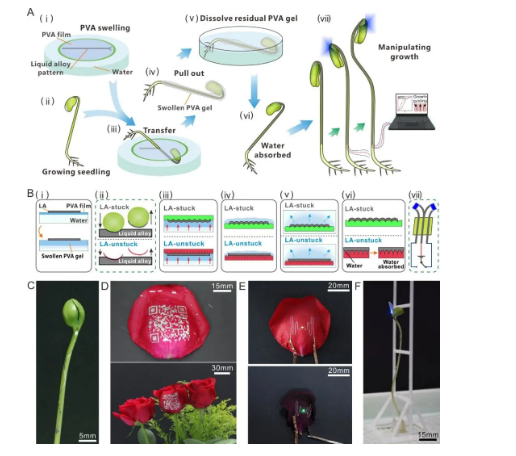
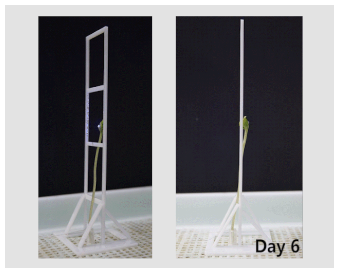
吴志刚教授团队长期开展液态金属方面的研究,发现镓铟锡液态金属低毒性可被植物体耐受,同时其具有液体的高流动性,可被操控附着在复杂三维表面上,这使得基于液态金属的变形电子的成为植物集成智能系统的潜在解决方案。此前许多方法被提出用于制造3D表面液态金属电路,然而这些方法往往依赖于机械压力,容易对脆弱植物造成损伤,同时,很多植物表皮的微、纳米级复杂结构导致其对液态金属的界面附着力非常弱,无法直接进行液态金属印刷。本工作提出了液态金属水转印技术,发现并解释了水转印过程中的高能液体能够克服微、纳米结构的疏液态金属特性,将液态金属贴附在植物表面并引导液态金属渗透进植物表面的微小结构中,从而使液态金属保持稳定的预设位置和形状。研究团队充分利用水转印技术制作过程的温和特性与液态金属的流动性,开发出了具有本质变形能力的植物变形电子,这种植物变形电子在快速生长(最高达到2.3mm/h)的植物表皮上能够保持功能稳定,并且适用于多种植物和应用,工作中展示了变形电子测量花瓣含水量和监测豆芽生长长度,还通过功能电路的布置和设计,使得液态金属变形电子与植物本体形成植物机器人系统,通过控制电路的光刺激响应,可以选择性地操纵植物的生长方向。此外,水转印液态金属技术具有极高的顺形性和普适性,能将图案印刷到曲率不连续的复杂三维曲面上,通过特殊的设计方法还能制作出360°环绕电路、单次成型的双面连通电路、狭窄空间的内壁电路等。
该工作证明了液态金属变形电子应用于快速生长植物的可行性和功能性,为生物智能系统和植物机器人的研制提供了新思路,并为植物学和精准农业的研究和开发提供了新的工具技术。该工作受到国家重点研发项目课题(No. 2017YFB1303100)和国家自然科学基金(No. U1613204)的支持。